
Abstrak
Pemantauan dinamika hutan sangat penting untuk memahami pendorong suksesi hutan dan memastikan hasil restorasi yang sukses. Pemindai laser pada sistem drone yang kuat sangat berharga untuk menembus tajuk hutan dan memberikan detail struktural. Dengan semakin mudahnya mengakses drone murah yang dilengkapi dengan sensor optik canggih, fotogrametri muncul sebagai alternatif yang potensial dan hemat biaya untuk memantau restorasi hutan. Tujuan kami adalah untuk mengeksplorasi potensi pemantauan lokasi restorasi hutan tropis menggunakan drone murah sebagai alternatif pemindaian laser udara. Dengan menggunakan regresi linier, kami membandingkan lima metrik yang berasal dari tajuk serta model kepadatan karbon di atas permukaan tanah (AGCD) yang dipasang dari tinggi tajuk rata-rata. Data dikumpulkan dari 30 plot seluas 900 m 2 yang diambil sampelnya dari perkebunan restorasi dengan usia yang berbeda. Hasil penelitian menunjukkan hubungan yang kuat antara pemindaian laser dan sensor optik berbiaya rendah untuk metrik tajuk, dengan r 2 = 0,83–0,99, root mean squared error (RMSE) % = 5,41–27,25%, dan mean absolute error (MAE) % = 3,81–16,41%. Kecenderungan sentral (misalnya tinggi rata-rata) diestimasi dengan lebih andal, sementara metrik yang terkait dengan variasi tinggi tajuk cenderung ditaksir terlalu tinggi oleh sensor optik. Model AGCD menunjukkan sedikit perbedaan, dengan nilai r 2 yang tinggi (0,87 dan 0,86) dan estimasi RMSE% (30,02 dan 31,33%) dan MAE% (25,15 dan 25,37%) yang sangat mirip, untuk pemindai laser dan sensor optik, masing-masing. Temuan kami menunjukkan bahwa fotogrametri udara digital dapat menghasilkan hasil yang sebanding dengan pemindaian laser dalam menilai struktur tajuk hutan yang direstorasi, yang berfungsi sebagai alternatif hemat biaya untuk pemantauan restorasi, khususnya di wilayah dengan kendala keuangan atau logistik untuk survei pemindai laser. Namun, data optik memiliki keterbatasan dalam menangkap informasi medan yang andal di wilayah hutan lebat.
Implikasi untuk Praktik
- Para pemangku kepentingan restorasi mungkin menganggap drone berbiaya rendah lebih menguntungkan daripada sistem pemindaian laser karena aksesibilitasnya yang lebih luas dan kemudahan penerapannya.
- Penggunaan metrik tajuk hutan yang diperoleh dari drone berbiaya rendah dalam proyek restorasi hutan untuk memodelkan biomassa dan stok karbon menunjukkan hasil yang menjanjikan.
- Menilai struktur dan pertumbuhan hutan melalui metrik kanopi yang diperoleh secara optik dapat membantu dalam tantangan pemantauan restorasi lanskap hutan tropis.
Perkenalan
Deforestasi dan degradasi hutan di Brasil dimulai lebih dari 500 tahun yang lalu, awalnya mempengaruhi bioma Hutan Atlantik dan sangat membahayakan keanekaragaman hayati dan penyediaan layanan ekosistemnya. Baru-baru ini, inisiatif, tujuan, dan komitmen restorasi ekologi telah muncul yang berupaya untuk mengurangi dampak manusia pada ekosistem (FAO 2005 ; Rodrigues et al. 2009 ). Ketika inisiatif ini menyebar ke seluruh dunia, permintaan untuk pemantauan dinamika hutan juga meningkat untuk memastikan bahwa lintasan restorasi mengarah pada pemulihan tutupan hutan, keanekaragaman hayati, dan layanan ekosistem (Rodrigues et al. 2009 ; McDonald 2016 ). Proses pemantauan biasanya dilakukan melalui pengumpulan data inventarisasi hutan tradisional pada parameter struktural dan keanekaragaman seperti diameter setinggi dada (DBH), tinggi pohon, keanekaragaman dan kekayaan spesies, dan tutupan tajuk (Chaves et al. 2015 ; Viani et al. 2018 ). Meskipun demikian, metode pemantauan tradisional hanya terbatas pada plot sampel di lokasi restorasi. Selain itu, kegiatan ini seringkali mahal, sulit, dan sangat menyita waktu, yang menghambat pemantauan skala besar (Masek et al. 2015 ; Fu et al. 2021 ). Oleh karena itu, penting untuk melengkapi metode tradisional dengan alat dan pendekatan baru untuk mendapatkan skala dan mempertahankan kualitas dalam pengukuran data.
Teknologi penginderaan jarak jauh telah muncul sebagai pendekatan yang menjanjikan untuk mengatasi tantangan pemantauan inisiatif restorasi skala besar dengan cara yang lebih efisien dan otomatis (Almeida et al. 2020 ; Almeida et al. 2021 ). Data satelit optik (mencakup resolusi spasial, spektral, dan temporal yang berbeda) dapat sangat berguna untuk tujuan pemantauan, tetapi juga memiliki keterbatasan, seperti saturasi spektral saat memperkirakan parameter hutan; penyelarasan temporal untuk akuisisi gambar; halangan awan; dan biaya tinggi untuk gambar resolusi tinggi (Zhang et al. 2019 ; Fu et al. 2021 ). Meskipun sensor orbital aktif seperti Global Ecosystem Dynamics Investigation (GEDI) dan Ice, Cloud, and land Elevation Satellite 2 (ICESat-2) memberikan informasi struktural tiga dimensi yang berharga untuk hutan, mereka juga menghadirkan keterbatasan yang terkait dengan cakupan spasial yang terbatas; daya penetrasi kanopi; pola pengambilan sampel; dan kepekaan terhadap kondisi atmosfer, yang menimbulkan tantangan bagi upaya pemantauan skala besar dan berkelanjutan, terutama untuk hutan suksesi awal (Silva et al. 2021 ).
Untuk mengatasi keterbatasan tersebut, penggunaan Remotely Piloted Aircraft Systems (RPAS) menjadi populer, menunjukkan potensi besar untuk memperoleh data resolusi tinggi dan memantau dinamika dan restorasi hutan. Sistem deteksi cahaya dan pengukuran jarak (LiDAR) RPAS menonjol karena dapat menembus kanopi hutan tropis yang lebat dan mengumpulkan data lantai hutan dan tanah (Almeida et al. 2020 ). Salah satu dari banyak produk yang dihasilkan oleh jenis sistem ini adalah titik awan tiga dimensi yang sangat padat (L-PC) yang darinya metrik struktur hutan dapat dihitung. Model tinggi kanopi turunan (CHM) mengungkapkan (di antara banyak lainnya) informasi tentang tinggi kanopi, fraksi celah, dan heterogenitas (McNicol et al. 2021 ). Dengan menggunakan data tersebut, banyak penelitian melaporkan aplikasi dan hasil yang sangat baik yang secara efektif dapat memandu pengambilan keputusan untuk pemantauan dan pengelolaan hutan; Namun, hasil ini sering kali bergantung pada sensor canggih pada RPAS yang kuat, sehingga meningkatkan biaya secara signifikan, terutama untuk area yang luas dan ketika data multitemporal diperlukan (Brancalion & Holl 2020 ; Almeida et al. 2021 ).
Fotogrametri udara digital dapat dilihat sebagai alternatif pemindaian laser untuk pemantauan restorasi hutan, karena juga memungkinkan ekstraksi data tiga dimensi dan informasi struktur tajuk melalui korespondensi gambar—identifikasi dan pencocokan fitur yang sama dalam beberapa gambar udara yang tumpang tindih (Nurminen et al. 2013 ; Goodbody et al. 2019 ; Gobbi et al. 2020 ). Selama beberapa tahun terakhir, akses ke RPAS berbiaya rendah namun bertenaga dengan sensor Merah, Hijau, dan Biru (RGB) beresolusi tinggi telah menjadi populer di seluruh dunia, membuatnya lebih mudah untuk menemukan, membeli, dan mengoperasikan sistem tersebut yang mampu memberikan produk berkualitas tinggi dengan biaya yang jauh lebih murah daripada yang dibutuhkan oleh teknologi LiDAR. Pendekatan ini didasarkan pada pengumpulan beberapa gambar yang tumpang tindih dari berbagai posisi di atas hutan yang memungkinkan rekonstruksi objek tiga dimensi. Prosedur ini dilakukan dengan menggunakan teknik Structure from Motion (SfM), yang menghasilkan titik awan tiga dimensi (RGB-PC) yang mirip dengan L-PC dan juga mampu memberikan informasi struktur hutan (Fankhauser et al. 2018 ; Krause et al, 2019 ; Fu et al. 2021 ). Saat ini, SfM dapat diterapkan untuk memproses gambar RGB resolusi tinggi melalui berbagai antarmuka yang mudah digunakan yang mencakup perangkat lunak komersial dan sumber terbuka. Selain itu, gambar RGB dapat dikumpulkan oleh RPAS berbiaya rendah yang dilengkapi dengan unit pengukuran inersia (IMU) dan Sistem Satelit Navigasi Global (GNSS) sambil juga menggunakan lintasan penerbangan otonom, yang menurunkan biaya keseluruhan sementara juga membuat pengumpulan data lebih mudah dan lebih efektif (Colomina & Molina 2014 ; Fankhauser et al. 2018 ). Dengan mempertimbangkan restorasi ekosistem, karakteristik ini memungkinkan pemantauan dilakukan lebih sering, sehingga berkontribusi pada tingkat keberhasilan yang lebih tinggi untuk lintasan restorasi (Ferrari et al. 2021 ; Cushman et al. 2022 ).
Meskipun memiliki kemiripan dengan L-PC, informasi RGB-PC terbatas pada tajuk hutan bagian atas, karena sensor RGB tidak mampu menjangkau bagian bawah tajuk dan tanah seperti yang dilakukan LiDAR. Kesalahan dapat terjadi saat menilai atribut seperti tinggi pohon dan tajuk menggunakan RGB-PC saja karena sulit memetakan tanah untuk membuat Model Medan Digital (DTM), terutama di hutan tropis yang lebat. Faktor lain yang dapat membahayakan atau menurunkan kualitas hasil RGB adalah heterogenitas tajuk. Proses untuk membangun RGB-PC didasarkan pada pencocokan fitur, yang berarti bahwa algoritme mencari fitur yang sama dalam beberapa gambar. Tugas ini dapat sulit dilakukan karena satu pohon atau daun dapat tampak berbeda dalam beberapa gambar karena kompleksitas bentuk alaminya atau faktor lain seperti bayangan, penghalang visual, sinar matahari, dan bahkan angin, yang menghasilkan RGB-PC berkualitas rendah atau berisik (McNicol et al. 2021 ; Cunliffe et al. 2022 ). Akan tetapi, masalah-masalah ini biasanya tidak terlalu parah di hutan terbuka atau hutan suksesi awal, di mana perbedaan antara komponen pohon dan non-pohon lebih jelas dan fitur yang lebih konsisten dapat dikenali di beberapa gambar. Tujuan dari penelitian ini adalah untuk mengeksplorasi potensi penilaian struktur tajuk dan pemodelan kepadatan karbon di atas permukaan tanah (AGCD) dalam proyek restorasi hutan tropis menggunakan RPAS yang hemat biaya dengan sensor optik pasif sebagai alternatif pemindaian laser aktif. Kami mengambil sampel dari 30 plot lapangan representatif dari area restorasi dan menjawab pertanyaan-pertanyaan berikut: (1) Apakah RGB-PC sebanding dengan L-PC saat menganalisis struktur tajuk? (2) Seberapa baik prediksi AGCD berdasarkan data RGB berkorelasi dengan yang diperoleh dari LiDAR?
Metode
Area Studi
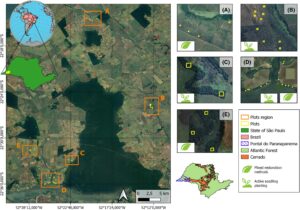
Studi ini dilakukan di area restorasi hutan di Pontal do Paranapanema, di ujung barat negara bagian São Paulo, Brasil, dan merupakan salah satu dari sedikit wilayah di seluruh dunia yang mewakili program restorasi lanskap yang berkelanjutan dan berhasil, yang dipandu oleh penelitian dan tindakan konservasi yang dilakukan selama 35 tahun, yang memberikan banyak manfaat sosial dan ekologi (Chazdon et al. 2020 ). Wilayah ini sebagian besar terletak di bioma Hutan Atlantik tetapi juga menunjukkan aspek sabana Brasil (Cerrado) di lokasi tertentu (IBGE 2019 ). Iklim setempat ditentukan oleh transisi antara tropis (Aw) dan subtropis lembap (Cfa) menurut klasifikasi Koppen, yang menunjukkan curah hujan bulanan lebih tinggi dari 40 mm dan suhu rata-rata sekitar 22°C (Köppen 1936 ; Alvares 2013 ).
Proyek restorasi yang dipelajari dalam penelitian ini dilakukan oleh Ecological Research Institute (IPE) dan mewakili formasi hutan tropis semi-gugur, dengan keanekaragaman dan kepadatan pohon yang tinggi. Area restorasi ini diwakili di sini oleh 30 plot (Gbr. 1 ) seluas 900 m 2 (30 × 30 m) dengan tajuk yang terstruktur dengan baik (tutupan tajuk tinggi) dan usia berkisar antara 2 hingga 17 tahun. Dari semua area restorasi yang dijadikan sampel, delapan di antaranya dilaksanakan dengan menggunakan metode restorasi campuran (pengayaan dan pemadatan) sementara untuk yang lain, strategi aktif diadopsi (penanaman bibit aktif). Tabel 1 merinci distribusi plot menurut usia dan metode restorasi.
| Usia restorasi (tahun) | Jumlah plot lapangan dan metode restorasi | |
|---|---|---|
| Penanaman bibit aktif | Metode restorasi campuran | |
| 2 | 9 | angka 0 |
| 3 | angka 0 | 1 |
| 5 | 2 | 4 |
| 8 | 2 | angka 0 |
| 12 | 4 | angka 0 |
| 13 | 5 | angka 0 |
| 17 | angka 0 | 3 |
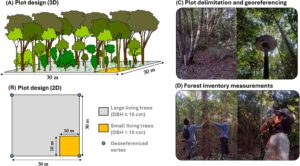
Diagram alir metodologis pekerjaan ini diilustrasikan oleh Gambar 2 dan dijelaskan secara lengkap dalam topik berikut.

Akuisisi dan Pemrosesan Data
Data LiDAR dan RGB dikumpulkan pada bulan Februari 2024 menggunakan RPAS dengan DJI Matrice 350 RTK dan sensor Zenmuse L2. Survei menggunakan metode koreksi diferensial Real-Time Kinematic (RTK), yang memungkinkan penyesuaian koordinat pesawat selama penerbangan melalui tautan radio dengan penerima GNSS L1/L2 presisi tinggi yang ditempatkan di titik tanah tetap. Penerbangan dilakukan pada ketinggian 120 m, dengan kepadatan titik data LiDAR melebihi 200 titik/m 2 , sementara data RGB dikumpulkan dengan tumpang tindih depan dan samping 70%, dan dengan sensor pada sudut 90°. Kami menggunakan perangkat lunak DJI Terra untuk merekonstruksi dan menghasilkan titik awan Lidar (L-PC). Selanjutnya, kami menggunakan antarmuka RStudio dan paket “lidR” (Roussel et al. 2020 ) untuk memproses L-PC. Pertama, kami melakukan klasifikasi titik tanah menggunakan algoritma Cloth Simulation Filter (Zhang et al. 2016 ); lalu kami menormalkan titik awan (mengubah data elevasi menjadi ketinggian) menggunakan triangulasi Delaunay; akhirnya, L-CHM dihasilkan pada resolusi 1 m untuk semua 30 plot menggunakan metode Point-to-Raster: untuk setiap piksel keluaran dikaitkan dengan ketinggian titik tumpang tindih tertinggi (pengembalian tertinggi per meter persegi).
Pemrosesan gambar RGB dilakukan menggunakan perangkat lunak Agisoft Metashape untuk menghasilkan titik awan RGB (RGB-PC) untuk 30 plot. Secara default, koordinat gambar tidak dikoreksi secara otomatis menggunakan stasiun pangkalan RTK, yang mengakibatkan sedikit ketidakselarasan antara RGB-PC dan L-PC. Ketidakselarasan ini dikoreksi secara manual dalam perangkat lunak CloudCompare dengan menggeser RGB-PC menggunakan L-PC yang sesuai sebagai referensi spasial. Ini dilakukan dengan mempertimbangkan buffer 15 m di sekitar poligon plot lapangan untuk menghindari segala jenis kehilangan informasi. Karena keterbatasan gambar RGB dalam menangkap titik di bawah permukaan tajuk (D’oliveira et al. 2021 ), titik tanah dari L-PC untuk setiap plot digabungkan dengan RGB-PC masing-masing, memastikan informasi medan yang akurat dalam data yang diperoleh dari fotogrametri (Gbr. 3 ). Kemudian, RGB-PC, yang dipadatkan dengan titik-titik tanah, diproses juga menggunakan paket “lidR” untuk menormalkan nilai elevasi terhadap ketinggian (triangulasi Delaunay) dan menghasilkan CHM (RGB-CHM) untuk setiap plot lapangan, juga mempertimbangkan metode Point-to-Raster (titik tertinggi per meter persegi).

Metrik Kanopi dan Analisis Komparatif
Bahasa Indonesia: Untuk membandingkan produk, kami menghitung lima metrik tajuk turunan CHM yang menggambarkan variasi dan karakteristik tajuk hutan. Semua metrik dihitung untuk kedua set data (LiDAR dan RGB) menggunakan antarmuka RStudio dan sesuai dengan penggunaan sebelumnya dalam literatur ilmiah (Tabel 2 ). Untuk perbandingan yang efektif, pendekatan pemodelan dilakukan dengan memasang regresi linier di mana metrik LiDAR digunakan sebagai variabel respons ( y ) dan metrik RGB sebagai variabel penjelas ( x ). Kesamaan antara metrik yang dihitung terutama diungkapkan oleh korelasi liniernya dan seberapa dekat model regresi yang dipasang mendekati garis referensi 1:1 (intersep 0 dan kemiringan 1). Untuk semua model, kami melaporkan koefisien regresi ( β 0 dan β 1 ), koefisien determinasi ( r 2 ), kesalahan absolut rata-rata (MAE), kesalahan kuadrat rata-rata (RMSE) dan Bias, dalam bentuk absolut (meter) dan relatif (%). Penilaian akurasi didasarkan pada nilai r 2 , RMSE, dan MAE sambil mempertimbangkan nilai LiDAR sebagai referensi. Selain itu, kami melakukan validasi silang leave-one-out (LOOCV) untuk semua model linier yang dipasang, di mana setiap observasi (setiap plot) dihapus secara berurutan dari kumpulan data, dan model linier dipasang menggunakan observasi yang tersisa; model yang dipasang kemudian digunakan untuk memprediksi nilai referensi (LiDAR) menggunakan nilai metrik yang diturunkan dari RGB dari observasi yang dihapus. Proses ini diulang secara berulang hingga semua observasi telah dihapus dan digunakan untuk prediksi. Akhirnya, model linier baru disesuaikan menggunakan nilai yang diamati (metrik yang diturunkan dari LiDAR) dan yang diprediksi dari LOOCV, yang juga dievaluasi menggunakan r 2 , RMSE, MAE, dan Bias (juga dalam bentuk absolut dan relatif). Kumpulan data lengkap yang digunakan untuk menyesuaikan regresi dapat ditemukan di Tabel S1 .
| Metrik | Singkatan | Keterangan | Referensi |
|---|---|---|---|
| Tinggi kanopi atas | TCH | Nilai rata-rata setiap piksel CHM dalam plot | Papa dan kawan-kawan ( 2020 ) |
| Ketahanan kanopi | SD | Nilai rata-rata deviasi standar tinggi dalam plot | Almeida dkk. ( 2019 ) dan Papa dkk. ( 2020 ) |
| Kekasaran kanopi | KASAR | Koefisien variasi tinggi tajuk dihitung dalam plot | Almeida dkk. ( 2019 ) dan Papa dkk. ( 2020 ) |
| Keterbukaan kanopi | Buka-5 | Fraksi piksel CHM di atas 5 m dan ambang celah 10 m 2 | Almeida dkk. ( 2019 ) dan Stark dkk. ( 2012 ) |
| Keterbukaan kanopi | Buka-10 | Fraksi piksel CHM di atas 10 m dan ambang celah 10 m 2 | Almeida dkk. ( 2019 ) dan Stark dkk. ( 2012 ) |
Sebagai metode perbandingan kedua dan pelengkap, kami melakukan pendekatan langsung dengan mengukur perbedaan antara nilai metrik yang diperoleh dari setiap sensor. Berdasarkan perbedaan yang dihitung, kami melaporkan metrik kinerja yang sama seperti yang digunakan untuk pendekatan pemodelan (RMSE, MAE, dan Bias). Untuk ini, kami juga menggunakan nilai yang diperoleh dari LiDAR sebagai referensi:
; Di mana
mewakili kesalahan untuk metrik yang dievaluasi pada plot i ;
mewakili nilai metrik yang diperoleh dari data LiDAR; dan
mewakili nilai metrik yang diperoleh dari fotogrametri (RGB).
Pemodelan Kepadatan Karbon di Atas Tanah
Estimasi karbon hutan dihitung di setiap plot menggunakan data inventaris yang dilakukan pada bulan April 2024. Pengukuran mencakup dua kumpulan karbon (Gbr. 4 ): pohon hidup besar (DBH ≥10 cm) dan pohon hidup kecil (3 cm ≤ DBH < 10 cm). Plot dipasang dengan bantuan kompas untuk memastikan sudut 90° untuk setiap sudut internal. Selain itu, kompas digunakan untuk menstandardisasi orientasi plot, dengan tepi pertama sejajar utara-selatan dan yang lainnya diperoleh berdasarkan sudut yang disebutkan sebelumnya. Panjang setiap sisi diukur dengan pita pengukur 50 m. Setiap sudut plot ditandai secara permanen dengan pipa polivinil klorida putih berdiameter 40 mm dan panjang 50 cm.
Data inventaris disediakan bersama geolokasi plot, yang dikumpulkan di keempat sudutnya menggunakan kit penerima GNSS L1/L2 dan mengikuti metode pengumpulan data statis. Metode ini terdiri dari perolehan titik verteks menggunakan antena penerima rover selama minimal 20 menit dalam mode statis, sementara antena dasar terus merekam selama minimal 4 jam. Titik-titik tersebut diproses pasca-produksi menggunakan perangkat lunak Survey Office setelah menyempurnakan koordinat antena dasar menggunakan Jaringan Pemantauan Berkelanjutan Brasil, yang merekam data GNSS setiap hari tanpa gangguan. Prosedur ini memastikan presisi dan akurasi tertinggi yang mungkin untuk survei, mengurangi nilai kesalahan hingga skala milimeter.
Data inventaris berisi DBH, tinggi ( H ) dan identifikasi spesies untuk setiap pohon dalam kedua reservoir karbon yang diambil sampelnya. Data taksonomi diverifikasi untuk memastikan bahwa informasi famili, genus, dan spesies tidak memiliki kesalahan ketik atau pembaruan terkini menggunakan antarmuka RStudio dan paket “BIOMASS”. Informasi ini kemudian digunakan untuk memperoleh nilai kerapatan kayu (WD) untuk setiap pohon, dengan memprioritaskan informasi tingkat spesies, diikuti oleh genus dan famili. Ketika tidak ada register dalam basis data paket “BIOMASS” atau identifikasi spesies tidak ada, nilai WD rata-rata plot digunakan. Akhirnya, menggunakan DBH, H , dan WD, biomassa pohon individu dihitung (Mg) dan kemudian dikonversi ke kerapatan plot (Mg/ha) menggunakan persamaan alometrik Chave et al.
Nilai kepadatan biomassa dikonversi ke AGCD menggunakan faktor 0,47 (IPCC 2006 ). Demikian pula, seperti yang dilakukan untuk metrik tajuk, model regresi linier dipasang untuk mengatasi hubungan antara kedua set data (tinggi tajuk rata-rata LiDAR dan RGB—tinggi tajuk atas [TCH]) dan plot AGCD dalam kg/m 2 . Metrik yang digunakan untuk mengevaluasi kedua regresi tersebut adalah r 2 , RMSE, MAE, dan Bias (juga dalam bentuk absolut dan relatif). Akhirnya, kami melakukan LOOCV untuk model-model ini, juga melaporkan metrik evaluasi yang disebutkan di atas.
Hasil
Metrik kanopi diprediksi dengan r 2 berkisar dari 0,83 hingga 0,99 (Tabel 3 ), yang menunjukkan kesesuaian yang baik antara variabel-variabel tersebut. Nilai RMSE berkisar dari 0,04 hingga 0,39 m (5,41–27,25%); dan nilai MAE berkisar dari 0,03 hingga 0,27 m (3,81–16,41%). Bias terhitung untuk semua regresi mendekati nol, yang menunjukkan tidak ada kecenderungan estimasi kurang atau lebih untuk model-model tersebut. Kinerja untuk metrik TCH menonjol dengan r 2 = 0,99, RMSE = 0,39 m (5,41%) dan MAE = 0,27 m (3,81%). Metrik keterbukaan kanopi pada ambang batas 5 dan 10 m juga menunjukkan kinerja yang baik, mencapai nilai r 2 sebesar 0,98 dan 0,99; RMSE% sebesar 8,9 dan 12,54%; dan MAE% masing-masing sebesar 5,95 dan 8,65. Di sisi lain, metrik SD dan ROUGH (yang membahas variasi tinggi tajuk) berkinerja lebih buruk, mencapai (masing-masing) nilai yang lebih rendah untuk r 2 (0,83 dan 0,87); dan nilai yang lebih tinggi untuk RMSE% (13,35 dan 27,25%) dan MAE% (10,04 dan 16,41%). Regresi yang dipasang diilustrasikan oleh Gambar 5 (setiap grafik juga dapat ditemukan secara rinci dalam Gambar S1–S5 ). Hasil LOOCV sesuai dengan model yang dipasang, dengan nilai r 2 berkisar dari 0,78 hingga 0,99; RMSE dari 0,04 hingga 0,42 m (5,38–30,36%); MAE dari 0,03 hingga 0,29 m (4,12–18,52%); dan bias estimasi yang sangat rendah untuk semua model, menekankan kinerja akurat dari model yang dipasang untuk berpotensi menyesuaikan nilai metrik yang diperoleh dari fotogrametri. Untuk langkah validasi ini, kinerja yang lebih buruk juga ditemukan untuk SD dan ROUGH (metrik variasi ketinggian), melaporkan (masing-masing) nilai yang lebih rendah untuk r 2 (0,78 dan 0,84); dan nilai yang lebih tinggi untuk RMSE% (14,88 dan 30,36%) dan MAE% (10,78 dan 18,52%). Regresi LOOCV yang dipasang diilustrasikan oleh Gambar 6 dan metrik evaluasi yang ditemukan ditunjukkan pada Tabel 4 (setiap grafik juga dapat ditemukan secara rinci dalam Gambar S6–S10 ).
| Metrik | Koefisien regresi | RMSE | MAE | Bias | r 2 | ||||
|---|---|---|---|---|---|---|---|---|---|
| β 0 | β 1 | Perut | % | Perut | % | Perut | % | ||
| TCH | 0,59 | 0,98 | 0.39 | 5.41 | 0.27 | 3.81 | -4.29E-16 | -6.01E-15 | 0,99 |
| SD | 0.38 | 0.64 | 0.20 | 13.35 | 0,15 | Tanggal 10.04 | 7.03E-16 | 4.65E−14 | 0.83 |
| KASAR | 0,01 | 0,78 | 0,09 | 27.25 | 0,06 | 16.41 | 3.47E-17 | 1.02E−14 | 0,87 |
| Buka-5 | 0,06 | 0,96 | 0,06 | 8.90 | 0,04 | 5.95 | -4.54E-16 | -7.14E-14 | 0,98 |
| Buka-10 | 0,01 | 1.05 | 0,04 | 12.54 | 0,03 | 8.65 | 2.38E-17 | 7.56E−15 | 0,99 |


| Metrik | Koefisien regresi | RMSE | MAE | Bias | r 2 | ||||
|---|---|---|---|---|---|---|---|---|---|
| β 0 | β 1 | Perut | % | Perut | % | Perut | % | ||
| TCH | 0.00 | 1.00 | 0.42 | 5.83 | 0.29 | 4.12 | -3.24E-17 | -4.53E-16 | 0,99 |
| SD | 0,06 | 0,96 | 0.22 | 14.88 | 0.16 | 10.78 | 6.53E−18 | 4.32E−16 | 0,78 |
| KASAR | 0,01 | 0,98 | 0.10 | 30.36 | 0,06 | 18.52 | -2.36E-18 | -6.93E-16 | 0.84 |
| Buka-5 | 0.00 | 1.00 | 0,06 | 9.57 | 0,04 | 6.39 | 1.29E−18 | 2.02E−16 | 0,98 |
| Buka-10 | 0.00 | 1.00 | 0,04 | 13.53 | 0,03 | 9.31 | -6.45E-18 | -2,05E-15 | 0,99 |
Perbandingan langsung dengan jelas mengungkapkan perbedaan minimal untuk semua metrik yang dievaluasi yang dihitung dari kedua sensor (Tabel 5 ). Nilai RMSE berkisar dari 0,05 hingga 0,62 m; MAE berkisar dari 0,03 hingga 0,53 m; dan bias dari -0,25 hingga 0,48 m. TCH menyajikan nilai tertinggi untuk RMSE dan MAE absolut, namun hanya mewakili 0,0009 dan 0,0007% (masing-masing) dari nilai referensi rata-rata. Semua metrik lainnya melaporkan kesalahan absolut dan relatif yang semakin rendah, terutama metrik tutupan tajuk (Open-5 dan Open-10). Bias yang dihitung menunjukkan bahwa nilai tinggi tajuk rata-rata (TCH) yang diturunkan dari RGB mungkin sedikit diremehkan (Bias = 0,48 m dan Bias% = 0,0007%); di sisi lain, ditemukan sedikit perkiraan yang berlebihan untuk SD (Bias = −0,25 m dan Bias% = −0,0004%) dan ROUGH (Bias = −0,09 m dan Bias% = 0,0001%). Perbedaan yang dihitung untuk setiap metrik pada tingkat plot dapat ditemukan di Tabel S2 .
| Metrik | RMSE | MAE | Bias | |||
|---|---|---|---|---|---|---|
| Perut | % | Perut | % | Perut | % | |
| TCH | 0.62 | 0,0009 | 0.53 | 0,0007 | 0.48 | 0,0007 |
| SD | 0.41 | 0,0006 | 0.31 | 0,0004 | -0,25 | -0,0004 |
| KASAR | 0,15 | 0,0002 | 0,09 | 0,0001 | -0,09 | -0,0001 |
| Buka-5 | 0,07 | Nomor 9.69E−05 | 0,04 | 5.34E−05 | 0,04 | 5.13E−05 |
| Buka-10 | 0,05 | Nomor 6.79E−05 | 0,03 | 4.52E−05 | 0,02 | Nomor 3.23E−05 |
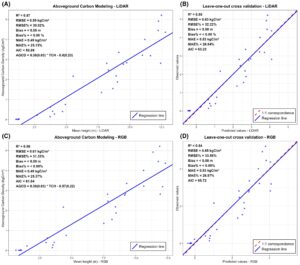
TCH adalah prediktor stok karbon yang baik menggunakan pendekatan linear (Tabel 6 ). Hasil menunjukkan kinerja yang sedikit lebih baik untuk dataset LiDAR dibandingkan RGB, dengan nilai r 2 sebesar 0,87 dan 0,86; RMSE% sebesar 30,02 dan 31,33%; dan MAE% sebesar 25,15 dan 25,37% (untuk LiDAR dan RGB, masing-masing). Nilai bias yang dihitung untuk kedua dataset juga mendekati nol, dan kriteria informasi Akaike (AIC) menunjukkan kecocokan yang sedikit lebih baik untuk model berbasis LiDAR (nilai lebih tinggi). Demikian pula, penilaian LOOCV juga sedikit lebih baik untuk dataset LiDAR dibandingkan RGB, mencapai (masing-masing) nilai r 2 sebesar 0,85 dan 0,84; RMSE% sebesar 32,22 dan 33,58%; dan MAE% sebesar 26,94 dan 26,97%. Bias juga ditemukan rendah, dan AIC juga menunjukkan kecocokan yang sedikit lebih baik untuk pendekatan berbasis LiDAR. Model yang sesuai diilustrasikan oleh Gambar 7 (setiap grafik juga dapat ditemukan secara rinci dalam Gambar S11–S14 ).
| Model | r 2 | RMSE | MAE | Bias | AIK | |||
|---|---|---|---|---|---|---|---|---|
| kgC/ m2 | % | kgC/ m2 | % | kgC/ m2 | % | |||
| AGCD-RGB | 0.86 | 0.61 | 31.33 | 0.49 | 25.37 | -4,95E-17 | -2,54E-15 | 61.54 |
| Kamera LiDAR AGCD | 0,87 | 0,59 | Tanggal 30.02 | 0.49 | Tanggal 25.15 | -4.86E-17 | -2.49E-15 | 58.99 |
| LOOCV-RGB | 0.84 | 0,65 | 33.58 | 0.53 | 26.97 | -6.94E-18 | -3.56E-16 | 65.72 |
| LOOCV-LiDAR | 0,85 | 0.63 | 32.22 | 0.53 | 26.94 | -5.09E-17 | -2.61E-15 | 63.23 |
Diskusi
Secara keseluruhan, ada kesamaan yang kuat antara hasil dari RGB dan LiDAR dalam menganalisis struktur tajuk dan pemodelan AGCD setelah data medan dipastikan untuk kedua set data. Ini menyoroti keuntungan menggunakan fotogrametri udara digital untuk penilaian berulang, menjadikannya alat yang berpotensi berharga untuk memantau proyek restorasi hutan dengan kepadatan dan keanekaragaman pohon yang tinggi (Jayathunga et al. 2019 ). Metrik struktur tajuk dapat berfungsi sebagai proksi untuk memahami dan memantau perkembangan hutan, terutama ketika akuisisi data berulang dipertimbangkan. Estimasi AGCD yang berasal dari RGB sangat menarik karena korelasi ini umumnya dilakukan dengan menggunakan data LiDAR, yang memerlukan investasi yang jauh lebih tinggi (Almeida et al. 2021 ). Meskipun ada kompleksitas yang melekat dalam pemodelan biomassa hutan dan stok karbon menggunakan penginderaan jauh, perbandingan yang disajikan di sini menyoroti potensi penggunaan RPAS RGB berbiaya rendah untuk merencanakan dan melakukan penilaian AGCD di area restorasi hutan. Pendekatan ini dapat memainkan peran penting dalam memajukan tujuan mitigasi iklim yang diuraikan dalam agenda lingkungan, khususnya di negara-negara tropis berkembang di mana sumber daya keuangan seringkali terbatas (Albuquerque et al. 2021 ). Lebih jauh lagi, dengan meningkatnya permintaan untuk restorasi hutan tropis skala besar, temuan-temuan ini menjanjikan karena mereka mewakili metode yang hemat biaya untuk membantu pemantauan restorasi lanskap menggunakan RPAS berbiaya rendah. Sistem-sistem ini lebih ramah pengguna dibandingkan dengan LiDAR RPAS dan dapat menjadi alat yang berharga dalam mendukung target restorasi internasional, seperti yang dipromosikan oleh inisiatif-inisiatif seperti Race to Zero, Race to Resilience, dan Bonn Challenge, serta program-program dan komitmen-komitmen nasional dan regional lainnya di bawah United Nations Decade on Ecosystem Restoration (United Nations 2019 ).
Sebagian besar metrik tajuk yang dihitung dengan data RGB mencapai nilai yang memuaskan (mirip dengan metrik LiDAR). Namun, semua metrik turunan RGB memerlukan penggunaan titik tanah yang terdefinisi dengan baik dari L-PC untuk menghitung nilai tinggi tajuk (normalisasi), yang menyoroti keterbatasan fotogrametri udara digital dalam memperoleh informasi medan yang akurat di lingkungan hutan yang lebat dan beragam (González-Jaramillo et al. 2019 ; McNicol et al. 2021 ). Keterbatasan tersebut tidak terbatas pada tanah, tetapi juga berlaku untuk informasi lapisan bawah. Dengan sedikit atau tanpa informasi tentang lapisan bawah, perbedaan ketinggian yang ditemukan di celah tajuk kecil—mulai dari puncak tajuk langsung ke titik tanah tambahan dari L-PC—bisa sangat signifikan, secara langsung meningkatkan nilai SD dan ROUGH yang dihitung untuk CHM turunan RGB seperti yang ditemukan dalam kumpulan data kami (White et al. 2013 ; Vaglio Laurin et al. 2019 ). Oleh karena itu, inferensi mengenai struktur hutan dengan data RGB lebih dapat diandalkan jika mempertimbangkan metrik yang terkait dengan kecenderungan sentral atau frekuensi, seperti TCH dan Open-5 atau Open-10 (LaRue et al. 2022 ; Fischer et al. 2024 ).
Untuk mendapatkan manfaat dari penggunaan data RGB saja untuk menganalisis struktur hutan, survei RGB perlu dilakukan sebelum melaksanakan proyek restorasi (pra-penanaman), saat medan masih bersih. Ini akan memastikan identifikasi topografi lokal melalui gambar, yang memungkinkan pembuatan DTM yang tepat. Untuk penerbangan pemantauan berikutnya, penting untuk memastikan penyelarasan produk yang dihasilkan; ini dapat dilakukan secara manual atau menggunakan titik referensi (titik kontrol tanah atau titik ikat yang dapat dilihat di area yang disurvei dari waktu ke waktu). Untuk proyek restorasi yang sedang berlangsung (dengan tutupan tajuk yang tinggi) atau untuk inisiatif yang menggunakan metode penanaman campuran, disarankan untuk melakukan survei gabungan awal LiDAR dan RGB. Ini memastikan akuisisi data medan presisi tinggi dan memungkinkan penilaian keakuratan estimasi yang diperoleh dari RGB. Penerbangan pemantauan berikutnya kemudian dapat dilakukan menggunakan sensor RGB; idealnya dengan satu jenis sistem RGB, untuk menghindari kesalahan sistematis karena instrumentasi. Analisis kami dilakukan selama musim hujan (daun baru tumbuh) di hutan semi-gugur yang sangat padat dan beragam dengan tajuk yang berkembang baik, yang merupakan kondisi terburuk untuk visibilitas tanah atau lapisan bawah, sehingga memerlukan data tambahan untuk menghasilkan CHM dari citra RGB. Meskipun penting dan direkomendasikan untuk memantau hutan tropis selama musim hujan, saat menangani hutan restorasi gugur atau formasi vegetasi jarang lainnya, survei setidaknya satu kali selama musim kemarau (daun baru tumbuh) dapat memberikan informasi data tanah yang cukup untuk membuat DTM yang andal, yang berpotensi menghindari perlunya survei LiDAR (Nuijten et al. 2021 ).
Model linier yang dikembangkan menggunakan estimasi AGCD tingkat lapangan dan metrik tinggi tajuk menunjukkan bahwa adalah mungkin untuk membuat model regresi untuk memperkirakan AGCD hutan menggunakan data RGB yang dapat berkinerja sebaik yang dipasang dari LiDAR, terutama dengan mempertimbangkan metrik kecenderungan sentral (TCH) sebagai variabel penjelas. Ketika menganalisis koefisien linier dan nilai AIC untuk kedua set data, hasilnya menunjukkan kesamaan yang mencolok antara model dan potensi prediktif yang sama karena koefisien dan ketidakpastian (kesalahan standar) sangat mirip (Almeida et al. 2020 ). Dengan kata lain, dengan menggunakan jumlah sampel (plot) yang memadai, model prediktif dapat dibuat dan diterapkan secara lokal ke petak hutan yang lebih besar sebagai metode berbasis area untuk estimasi AGCD menggunakan data fotogrametri udara digital (bersama informasi medan), yang dapat berkontribusi secara signifikan untuk memantau area restorasi yang besar sambil mengurangi biaya dan memberikan penilaian stok karbon yang akurat (McNicol et al. 2021 ).
Tidak dapat disangkal bahwa fotogrametri udara digital memiliki keterbatasan. Kemampuan untuk menyelidiki dan menganalisis lapisan bawah dan struktur vertikal serta distribusi kepadatan hutan tetap eksklusif untuk data LiDAR, terutama di area yang data tanahnya tidak tersedia (Almeida et al. 2021 ). Namun, penelitian ini mengonfirmasi hubungan antara hasil LiDAR dan RGB mengenai metrik struktur kanopi dan potensi pemodelan AGCD untuk proyek restorasi hutan tropis (Fankhauser et al. 2018 ). Karena survei RGB dapat dilakukan dengan mudah menggunakan RPAS berbiaya rendah, protokol pemantauan restorasi yang hemat biaya dapat dirancang, berkontribusi pada tujuan restorasi global dan juga membantu mengumpulkan atribut untuk ekosistem hutan tropis yang belum dipelajari (McNicol et al. 2021 ). Akhirnya, kami juga menyoroti potensi untuk memperluas aplikasi survei optik untuk pemantauan restorasi, khususnya citra resolusi tinggi yang diperoleh dari fotogrametri udara digital (ukuran piksel sekitar 1 cm), yang dapat digunakan bersama algoritma kecerdasan buatan dan model jaringan saraf konvolusional untuk menilai dan mengukur keanekaragaman hayati hutan, mengidentifikasi dan mengklasifikasikan berbagai spesies di tajuk hutan (Schiefer et al. 2020 ). Aplikasi lain juga digunakan di sektor pertanian untuk mendeteksi dan mengukur keberadaan spesies rumput invasif di antara tanaman pangan, masalah yang juga muncul pada tahap awal proyek restorasi (Genze et al. 2022 ). Selain itu, model-model ini dapat digunakan selama tahap awal proyek restorasi aktif untuk mengidentifikasi dan menghitung bibit yang ditanam, yang memungkinkan penilaian tingkat kematian dan kegagalan penanaman. Studi serupa telah dilakukan dengan fokus pada bibit yang berbeda, seperti tumbuhan runjung (Pearse et al. 2020 ), cemara (Lopatin & Poikonen 2023 ) dan bahkan tanaman pertanian (Badgujar et al. 2024 ). Drone berbiaya rendah dan sensor optik membuka batas baru untuk pemantauan ekosistem, yang memungkinkan evaluasi keberhasilan restorasi yang komprehensif dan hemat biaya di seluruh dunia.

Tinggalkan Balasan